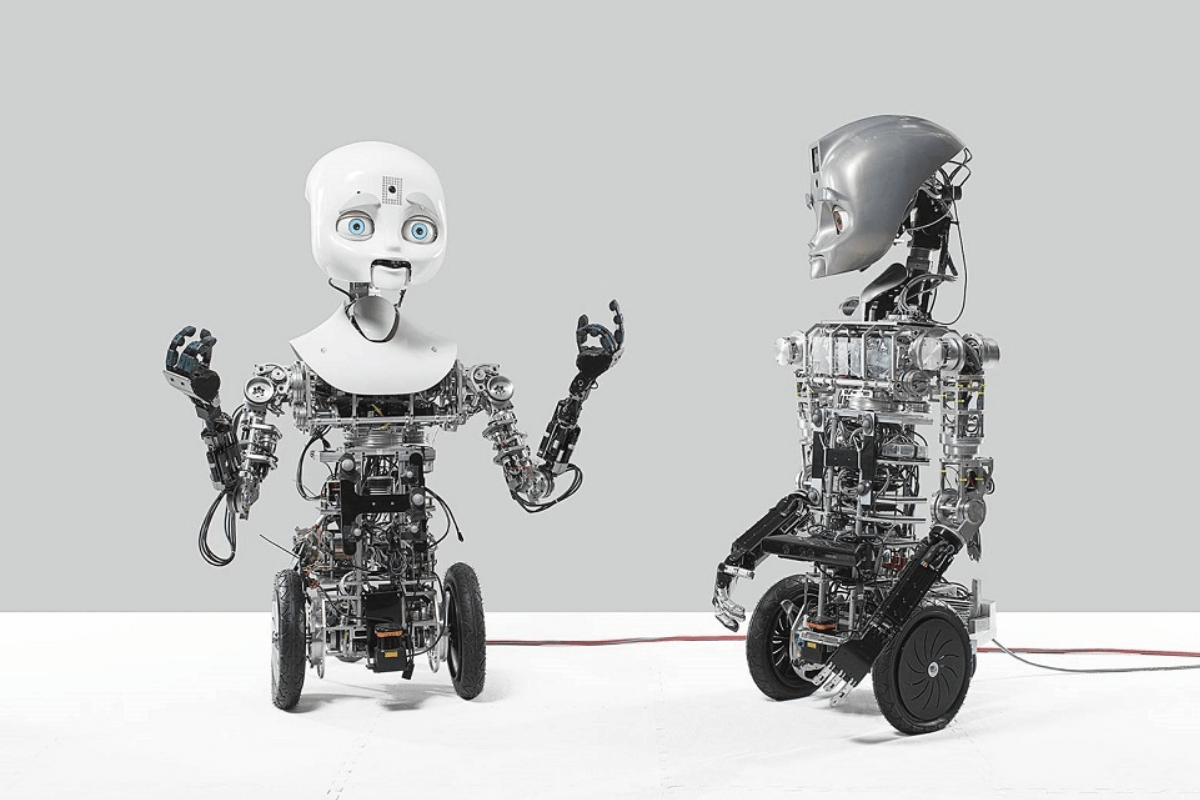
інженери сконструювали робота-собаку, який навчився ходити за одну годину
Комп'ютерна програма виступає в якості штучного представлення спинного мозку тварини і вчиться оптимізувати рухи робота за короткий час
Вчені зі Штутгардського Інституту інтелектуальних систем Макса Планка досліджували процес того, як новонароджені тварини починають ходити. Дослідники побудували робота, що імітує цей процес, про це повідомив новинний портал ScienceDaily 18 липня 2022 року.
Щойно народжені жирафи та лошата повинні оволодіти навиком ходьби якомога швидше, щоб не стати легкою здобиччю хижаків. Новонароджений тварини вже мають м'язові координаційні мережі, які розташовані в спинному мозку.
Як би там не було, точна координація м'язів і сухожиль вимагає часу і тренувань. Перші кроки робляться пір суворим контролем закріплених рефлексів спинного мозку. Вони допомагають новонародженому уникнути травм і падінь на перших порах. Пізніше з'являється інший, більш точний контроль м'язів, і так до тих пір, поки нервова система не адаптується до м'язів і сухожиль.
Колишній докторант дослідницької групи з динамічної локомоції Інституту інтелектуальних систем Макса Планка, Фелікс Рупперт, розповів про дослідження його групи: «Наша група, що складається з інженерів і Робототехніків, сконструювала робота, у якого є рефлекси, властиві тваринам і який може вчитися на своїх помилках. Один випадок того, коли тварина спіткнулося – не помилка, якщо це станеться всього один раз. Але регулярне спотикання покаже, що у робота щось йде не так».
Робот команди Руперта за одну годину може міцно встати на ноги і почати ходити, використовуючи складну механіку своїх кінцівок. Процес оволодіння навиком відбувається згідно з алгоритмом оптимізації-дані, отримані сенсорами від» стопи " робота зіставляються з інформацією штучного спинного мозку, який працює в роботі як програма. Робот вчиться здійснювати рухи, постійно зіставляючи отримані і відправлені дані від сенсорів, виконуючи рефлекторні цикли і змінюючи свої алгоритми управління «ногами».